




|
|
|
|
|
YGC电液伺服拉杆油缸 |
YGC电液伺服拉杆油缸 |
YGC电液伺服拉杆油缸 |
描述
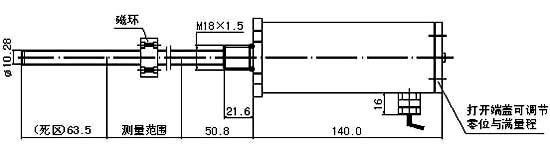
● YGC系列和YGD系列电液伺服拉杆液压缸为吸收派克公司和力士乐公司技术研制的液压缸。 主要有两种:1.带接近开关的液压缸:即在标准YGC/YGD系列液压缸前后缸盖内安装上电感式接近开关。电感式接近开关能在液压缸完全外伸或内缩时提供指示,该装置工作温度-35~+80°C,使用压力密封,作用于传感器上的动态压力最高可达30MPa。2.带磁致伸缩直线位移传感器和伺服阀块的液压缸:GC系列液压缸所用磁致伸缩位移传感器是一种无机械接触并且没有位置限制的传感 器,传感器工作压力可达35MPa。工作原理是磁场的相互影响,即通过接通磁场产生磁力应变脉冲,该应变脉冲通过波导管从测度点至传感头输入至传感器,该输送时间将持续不变并且不受温度影响,只与线圈位置成比例,那是确切实际的位置测量值,并随传感器转变成模拟量输出或模拟量输出成数字输出,由于控头装在缸头上并插入空心活塞杆,所以活塞杆强度需受影响 ,一般活塞杆直径需大于36mm。该位移传感器有四种不同形式输出 。YGD系列液压缸不能安装位移传感器。
※型号选择
YG
C -
D/d
- E
×
200
- TB
4
1
1
N
-
Y
NJR
C
–油缸系列:C-差动缸,D-等速缸
D/d
–缸径/杆径
E
–压力等级:C-7MPa,E-14MPa,D-21MPa
200
–行程(mm)
TB
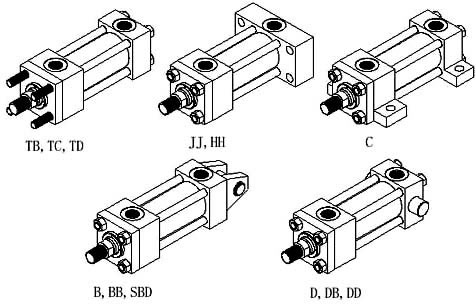
–安装方式:TB-拉杆伸出缸头端,TC-拉杆伸出缸底端,TD-拉杆伸出两端,JJ-缸头矩形法
兰,HH-缸底矩形法兰,C-切向脚架,B-缸底单耳,BB-缸底双耳,SBD-缸底单耳带关节轴
承,D-缸头中间耳轴,DB-缸底中间耳轴,DD-中间耳轴
4
–活塞杆端方式:3-非标活塞杆端,4-杆端外螺纹,9-杆端内螺纹(160、200缸径除外)
1
–油口螺纹:1-英制内螺纹,2-公制内螺纹
1
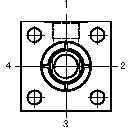
–进、出油口位置:1、2、3、4
N
–缓冲型式:B-两端缓冲,R-杆端缓冲,H-底端缓冲,N-无缓冲
Y –活塞杆是否加长: 若需加长以mm为单位用文字说明,不填写为不加长
NJR –接近开关或传感器:NJR-缸头接近开关,NJL-缸底接近开关,NJ-两端接近开关,NTM-NT
型数字量位移传感器,开关,NTM-NT型数字量位移传感器 ,NTF-NT型模拟量位移传感器,
NDM-ND型数字量位移传感器,NDF-ND型模拟量位移传感器
注: NT型位移传感器适合于除缸底耳环安装方式以外的所有安装方式;ND适合于缸底耳环安装方式(B,BB,SBD)
※电液伺服拉杆油缸油口位置图
※电液伺服拉杆油缸外形安装连接尺寸图
※电液伺服拉杆油缸内部结构图

※低摩擦密封装置(低摩擦油缸)
优点:平稳运行工作-减少爬行和振荡理想地适合于伺服用途青铜填充聚四氟乙烯为了低
摩擦、迅速起动和长使用寿命
※低摩擦活塞杆密封装置
1-两道阶梯密封活塞杆密封件保证可靠的密封性和平稳地运行
2-弹性体胀圈为了压力补偿和低压有效性
3-双唇防尘圈防止污染物侵入和刮去剩余油膜
4-活塞杆直径必须≥32mm
※低摩擦活塞密封装置
1-两道青铜填充聚四氟乙烯活塞导向环为了高承载能力、低摩擦和没有金属对金属接触
2-青铜填充聚四氟乙烯活塞密封件保证最高的密封效率
3-弹性体胀圈为了压力补偿
4-缸径必须≥50mm
※密封件摩擦力
由于所卷入的变量的多重性,在一组给定的工作条件下的密封件摩擦力是很难计算的。右边曲线图是作为性能计算中使用的导则给出的。
但 是对于关键用途应在模拟的或实际的工作条件下进行测量。
※计算运行摩擦力
油缸的密封件摩擦力是作为由各个密封件引起的摩擦力之和(=防尘密封摩擦力+活塞杆密封件摩擦力+活塞密封件摩擦力),用下列公式来计算:
Y形密封 活塞杆+活塞: 2d+2FYd+4FYD
Y形密封
活塞杆+低摩擦活塞: 2d+2FYd+4FPD
低摩擦活塞杆+低摩擦活塞: 2d+2FPd+4FPD
式中:d=活塞杆直径(mm);D=缸径(mm);FY=Y形密封的摩擦系数:FP=聚四氟乙烯的摩擦系数
※起动摩擦力
起动摩擦力可以通过运用下列修正系数来计算:
修正系数:Y形密封=FY×1.5; 低摩擦=FP×1.0
※计算示例
缸径80杆径45的油缸带低摩擦密封装置在15MPa下:
运行摩擦力=2d+2FPd+4FPD=2×45+2×1.3×45+4×1.3×80=623(N)
基于零压力,起动摩擦力=2d+2FPd+4FPD=2×45+2×0.3×45+4×0.3×80=213(N)
※磁致伸缩工作原理
磁致伸缩指一些金属(如铁或镍),在磁场作用下具有伸缩能力,磁致伸缩的效果是非常细微的。磁致伸缩的原理是利用两个不同磁场相交时产生一个应变脉冲,然后计算这个信号被探测所需的时间周期,从而换算出准确的位置。这两个磁场一个来自活动磁铁,另一个则来自自由传感器头的电子部件产生的电流脉冲。这个称为“询问信号”的脉冲沿着传感器内以磁致伸缩材料制造的波导管以声音的速度运行。当两个磁场相交时,波导管发生磁致伸缩现象,产生一个应变脉冲。这个称为“返回信号”的脉冲很快便被电子头的感测电路探测到。从产生询问信号的一刻到返回信号被探测到所需的时间周期乘以固定的声音速度,我们便能准确的计算出磁铁的位置变动。这个过程是连续不断的,所以每当活动磁铁被带动时,新的位置很快就会被感测出来。
※传感器尺寸和技术参数
|
输出方式 |
模拟,数字 |
速度输出 |
0.1~10m/s |
|
测量数据 |
位置 |
电源 |
+13.5~26.4V(适用于行程S≤1525mm) +24V±10%(适用于行程S>1525mm)≥ |
|
测量范围 |
模拟:25~2540mm, |
用电量 |
100mA |
|
分辨率 |
模拟:无限(取决于控制器D/A与电源波动) 数字:1÷梯度×内置频率(MHz)×阅读次数) |
工作温度 |
-40~+85°C(电子头) -40~+105°C(热敏元件) |
|
非线性度 |
满量程的±0.02%或±0.05mm(以较高者为准) |
可调范围 |
模拟:5%可调零点和满量程 |
|
重复精度 |
与分辨率一样 |
更新时间 |
模拟:一般≤1ms 数字:最少=[量程 (英寸) +3]×9.1μs |
|
滞后 |
<0.02mm(不包括滑块磁铁的机械间隙) |
工作压力 |
静态:5000psi(345bar),峰值:10000psi(610bar) |
|
位置输出信号 |
数字:0~10V,10~0V;4~20mA,20~4mA;0~20mA,20~0mA;数字:RS422脉冲,PWW脉宽调制 |
接头选型 |
D6(6针DIN)插座,RB(10针)插座 RG(7针)细头插座,MS(10针)插座 |
※反馈精度
一个给定的反馈装置的精度由许多因素组成,其中最重要的因素是:
分辨率-该装置的将产生可测量的输出的最小运动
非线性-信号对直线输出的偏离
重复性-重复定位于一个固定点时输出信号的最大偏离
滞环-当从相反的方向趋近一个固定点时信号的偏离
温度系数-由温度变化引起的输出的变化。这是温度对缸、传感器及电子电路的影响的综合这些因素关于反馈装置本身,它们是相加的。给定的系统所实现的性能与各种因素有关,诸如系统刚度、阀性能、摩擦、温度变化、以及与缸的机械连接中的游隙。
在前法兰安装的缸的场合,由液压压力变化所引起的缸的延伸可能影响位置重复性和系统性能。
※带磁致伸缩直线位移传感器和伺服阀块的油缸
磁致伸缩直线位移传感器刚性地连接于油缸的无杆端,并在空心活塞杆内走完全行程长度。一个磁铁连接于油缸活塞。当活塞沿行程运动时,该传感器通过测量在传感器波导中发射的应变脉冲的发出与返回之间的时间间隔能确定磁铁的准确位置。带位移传感器油缸可根据工矿需要准确停位,在电控和液控系统的协调配合下,实现高速准确的工业自动控制。由于传感器元件都是非接触的,尽管感测过程连续不断,也不会对传感器造成任何磨损,故可承受高温高压和高冲击的工作环境。可以在油缸有杆端和无杆端未被安装占有的任何位置安装伺服阀块,这样可使油缸和阀连接最靠近,减小液压管路长度,客户自备的伺服阀可集成安装在油缸上。
※电液伺服拉杆油缸内部结构图


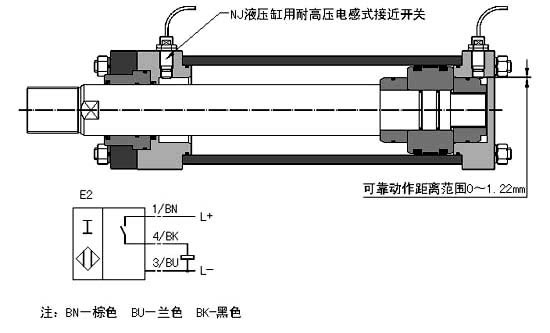
※YGC/YGD系列带接近开关的液压缸
我公司可在YGC/YGD系列液压缸的两端极限位置上,设置抗高压型电感式接近开关,装置紧凑,安装调整方便。这种接近开关可在液压缸活塞运动到行程终点时发出电信号,一般总是与行程终端缓冲连合使用。电感式接近开关的工作原理是当金属元件进入由传感器产生的磁感应范围时,引起磁场的变化,从而改变传感器的通/断状态。当缓冲柱塞接近传感器时,便使电子开关工作。带接近开关的液压缸可在行程终端距离1~1.22mm之间调节。当液压缸带接近开关时,液压缸的油口位置就不在正上方,而在右或右下方的位置,也可按客户要求供货。
※接近开关技术特性
| 动作距离S | 1.22 | 过载脱扣(mA) | ≥200 |
| 允许压力(静态/动态)(MPa) | 50/35 | 接通延时(ms) |
≤8 |
| 波峰电压Vpp(余波) | ≤10% | 瞬时保护 | 2kv,1ms,1kΩ |
| 空载电流(mA) |
≤7.5 |
开关频率(Hz) |
2000 |
| 输出状态 | No.pnp | 开关滞后 | 3~15% |
| 连续负载电流(mA) | ≤200 | 温度误差 |
±10% |
| 电压降(v) | ≤1.8 | 重复精度 | ≤2% |
| 极性保护 | 有 | 防护等级(DIN40 050) | IP 67 |
| 断线保护 | 有 | 温度范围(°C) | -25~70 |
| 短路保护 | 有 | 固定转矩(N·m) | 25 |
| 电源电压(工作电压)(v) |
DC10~DC30 |
接线方式 | Conprox DC |
※电液伺服拉杆油缸内部结构图
电话:0510-83217215

无锡名尧企业网站




